
Rover
研究概要
近年、惑星表面や災害現場などの広大なフィールドには探査ローバのような大型の走行ロボットが投入されており、水資源などを探すことやサンプル回収をすることが求められています。一方で広大ではないフィールド、つまり街中やショッピングモールなど屋内屋外関係なく、人が多くいる場所で中型から小型のロボットが導入され、案内ロボットや荷物運搬作業の効率化といった省人化などが求められています。しかし、単に屋内での荷物運搬用自律移動ロボットと言っても人が常に出入りし、周囲の環境が変化していく状況での走行は、単純な走行に膨大な計算を要し、人との衝突回避やロボットの姿勢が崩れる事による荷物の落下など多くの課題が存在します。Rover班では、中型の自律移動ロボットを所有し、ビルや病院や商業施設といった屋内施設だけでなく、街中や空港といった屋外での自律走行を目指して日々開発・研究を行っています。現在は、毎年夏に開催されるつくばチャレンジ出場を目標に基本性能だけでなく、新規機能の追加、各個人の研究成果の搭載先として活躍をしています。
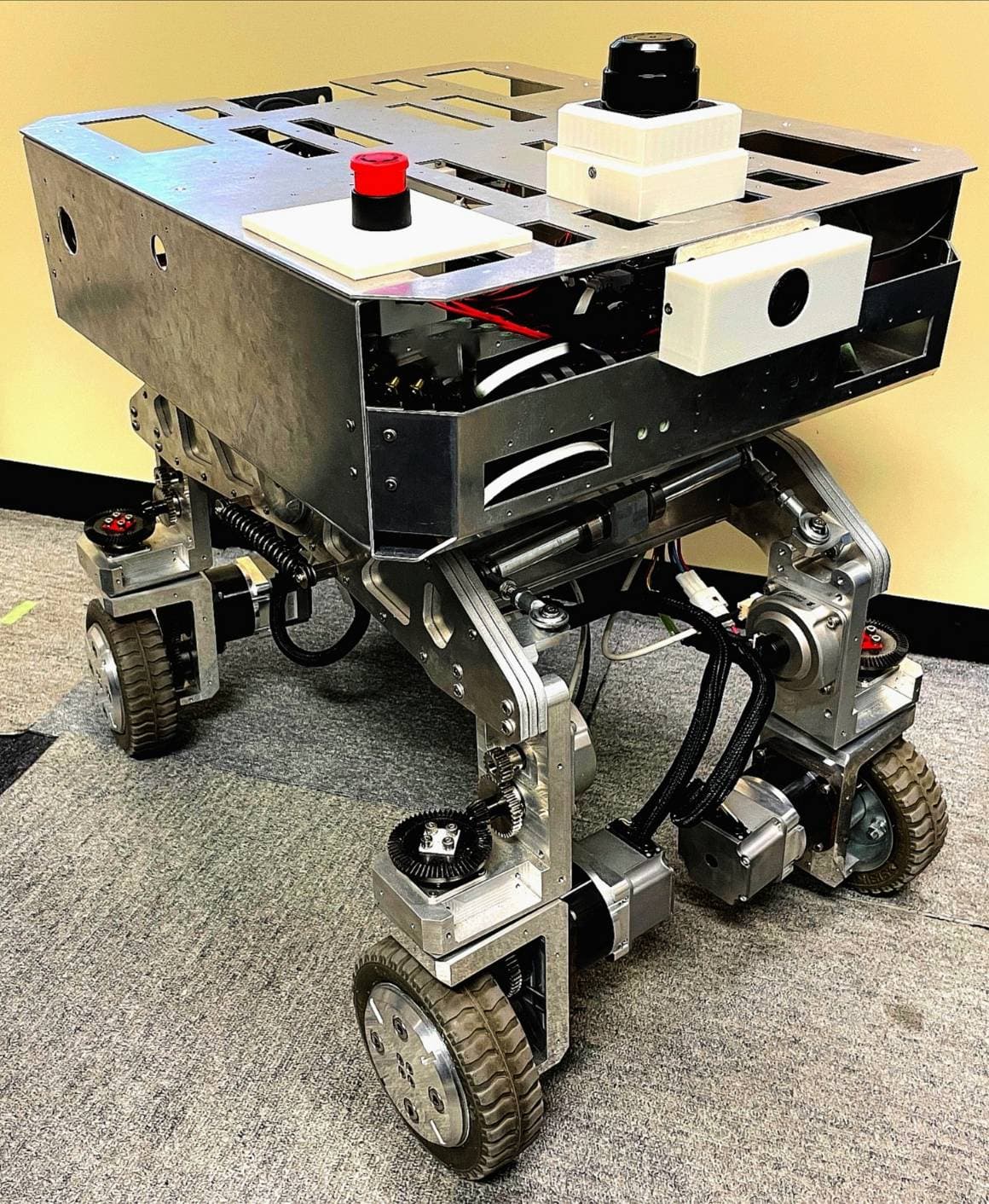
ROSを用いた自立走行ロボットPF1
Rover班のロボットはPF1と呼ばれ主にROSを用いて、自律走行を行っています。ROSはRobot OperatingSystemと呼ばれるソフトウエア開発者のロボット・アプリケーション作成を支援するライブラリとツールを提供しているロボット向けオペレーティングシステムです。近年の自動車やロボットは単に「進む」、「止まる」、「曲がる」の動きだけでなく、Lidarやカメラを用いて周囲の環境を認識し、SLAMによって求められた自己位置からゴールに向かって走るといった複雑な処理で構成をされています。これら複雑な処理をNodeによる並列処理が可能なROSを用いる事で実現しており、PF1もシステムの80%がROSで構成されています。
